HD AEC | Acoustic Echo Cancellation SW
HD AEC: High Definition Acoustic Echo Cancellation Software | HD SAEC: Stereo AEC
True full-duplex acoustic echo cancellation under a wide dynamic range of audio levels.
Adaptive Digital’s HD Acoustic Echo Canceller (HD AEC™) is a High Definition, Multi-Mic Capable, Full-Duplex Acoustic Echo Cancellation algorithm which includes noise reduction (NR), as well as anti-howling, adaptive filtering, nonlinear processing, and double-talk detection. It supports bandwidths from 8 kHz. (Narrowband-NB) to 48 kHz. (Full-Band-FB).
High-Definition Acoustic Echo Cancellation
Combining Acoustic Echo Cancellation with VQE algorithms to provide Superior Voice Clarity
Noise Reduction
- Introduced pre-NLP, resulting in a far cleaner audio stream
- Adapt to changes in the acoustic path (including gain/loss changes)
Auto Gain Control
- Boosts lower level speech signals in hands-free environments
Anti-Howling
- Identifies when instability is starting to occur and takes action to mitigate the instance of feedback loopingands-free environments
Request Information
Acoustic Echo Canceler of the highest quality standards provides superior voice clarity to VoIP applications.
Customizable to your requirements.
Inquire with your specifications.
Fill out the form to receive more information
HD AEC Demo - Sampling Rate = 48 kHz

MICROPHONE INPUT (TX IN)
Female voice: ECHO – Male voice: Near End talker
Female voice (ECHO) is COMPLETELY REMOVED!
MICROPHONE OUTPUT (TX OUT)
The acoustic echo cancellation software product provides superior voice clarity and true full-duplex performance under a wide set of challenging acoustic environments. It is capable of eliminating the acoustic echo in difficult conditions such as unbalanced speech levels, close speaker to mic proximity, indoor/outdoor environments, background noise, reflective room surface, double talk, and echo path changes.
Adaptive Digital’s HD AEC acoustic echo cancellation technology can be found in a wide range of applications, like IP Intercom Systems, Conference Speakerphones for both large and small conference rooms/huddle rooms, IP Desk Phones, Mobile Handsets, Radio over IP, and essentially anywhere where voice quality is affected by adverse room conditions. Additionally, the HD AEC acoustic echo canceller is effective in improving the performance of speech recognition algorithms when operating in an echoic environments.

Features List
- True full-duplex operation under a wide dynamic range of audio levels, even when microphone input signal is weak
- Programmable sampling rate, supporting narrowband (8 kHz), wideband (16 kHz), super-wideband (32 kHz), and full-band (44.1, 48 kHz)
- Improved adaptive nonlinear processor
- Handles echo tails of up to 500 msec. and greater, with true full-duplex cancellation.
- Spectrally representative comfort noise generator
- Automatically adjusts for unknown bulk (buffering/audio driver) delay
- Able to handle strong echo (speaker to microphone gains up to 20 dB)
- Anti-Howling
- Instantly adjusts to user-controlled speaker gain changes
- Handles external user-controlled volume changes
- Parameters are user configurable
- Improved fast convergence and reconvergence
- No divergence during double-talk
- Integrated Automatic Gain Control (AGC)
- Improves speech recognition performance in an echoic environment.
- Integrated Next Gen Noise Reduction (NR)
- Integrated Transmit Equalization
Availability
| Platforms |
| Arm ® Devices – Armv7-A / Armv8-A / Armv9-A || Armv7-M / Armv8-M || Armv8.1-M || Arm® Devices – Armv7-M / Cortex-R5 || Legacy M3 |
| Texas Instruments – TI TMS320C7000 C7x | TI TMS320C6000 C64x/C64x+/C66x, C674x | TMS320C5000 C55x |
| MIPS Architecture – MIPS64 Preliminary |
| Analog Devices – SHARC |
Availability – Fullband Stereo HD AEC
| Platforms |
| Arm ® Devices – Armv7-M Cortex-M7 @ 48 kHz / Armv8-A / Armv9-A | Armv8-M Cortex M33/35, Armv8.1M Cortex-M85 |
| Intel Core i7 Mobile – 6600u – Skylake |
| Operating Systems |
| Linux x86 (32-bit) / x64 (64-bit) |
| Windows 32-bit / 64-bit |
| Android |
| iOS |
| Operating Systems |
| Linux x86 (32-bit) / x64 (64-bit) |
ADT HD AEC is available on the above Platforms: Other configurations are available upon request.
Specifications
NOTE: We specify MIPS (Millions of Instructions Per Second) as MCPS (Millions of Instruction Cycles Per Second). Unless otherwise specified, peak MIPS are indicated.
↓ Click on links below to view specification tables.
HD AEC Armv8-A | A53 / A72
CPU UtilizationA53 Board: MCM-iMX8M-Mini, Cortex-A53, 1.8GHz
A72 Board: Raspberry Pi 4, Cortex-A72, 1.5 GHz
| Platform | Sampling Rate | Tail Length (msec) | Avg MIPS | Max MIPS |
| Cortex-A72 | 8 kHz | 256 | 14 | – |
| 16 kHz Wideband | 256 | 28 | – | |
| 48 kHz Fullband | 256 | 88 | – | |
| Cortex-A53 | 8 kHz | 256 | 24.5 | 50.5 |
| 16 kHz Wideband | 256 | 57 | 94 | |
| 48 kHz Fullband | 256 | 187 | – |
HD AEC Armv7-A Cortex-A8/A9/A15/A17 | Armv8-A | Armv9-A
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | Min MIPS | Avg MIPS | Max MIPS | Per Channel Memory |
| Cortex-A8 | 8 kHz | 32 | 50 | 56 | 74 | 24k |
| 64 | 52 | 58 | 74 | 33k | ||
| 128 | 53 | 59 | 79 | 54k | ||
| 256 | 53 | 61 | 82 | 109k | ||
| 320 | 54 | 63 | 85 | 143k | ||
| 400 | 54 | 64 | 89 | 191k | ||
| 512 | 57 | 67 | 90 | — | ||
| Cortex-A8 | 16 kHz | 32 | 99 | 112 | 148 | 44k |
| 64 | 102 | 115 | 154 | 61k | ||
| 128 | 105 | 121 | 168 | 96k | ||
| 256 | 111 | 134 | 182 | 180k | ||
| 320 | 116 | 140 | 186 | 228k | ||
| 400 | 127 | 155 | 217 | 293k | ||
| 512 | 151 | 182 | 250 | — | ||
| Cortex-A8 | 32 kHz | 32 | 198 | 232 | 311 | 61k |
| 64 | 211 | 243 | 327 | 96k | ||
| 128 | 226 | 266 | 354 | 180k | ||
| 256 | 281 | 321 | 476 | 396k | ||
| 320 | 263 | 332 | 479 | 529k | ||
| 400 | 400 | 483 | 623 | 718k | ||
| 512 | 467 | 566 | 729 | — | ||
| Cortex-A8 | 48 kHz | 32 | 297 | 351 | 471 | 78k |
| 64 | 325 | 380 | 522 | 136k | ||
| 128 | 375 | 452 | 650 | 280k | ||
| 256 | 595 | 710 | 934 | 678k | ||
| 320 | 677 | 808 | 1035 | 932k | ||
| 400 | 819 | 985 | 1245 | 1302k | ||
| 512 | 952 | 1152 | 1474 | — |
HD AEC ARM Cortex-M4
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS*per Mic | Program Memory | Data Memory | Per Channel Memory |
| Cortex-M4 | 8 kHz | 32 | 44 | 65k | 5k | 47k |
| 64 | 47 | 50k | ||||
| 128 | 50 | 57k | ||||
| 256 | 56 | 65k | ||||
| 512 | 82 | 96k | ||||
| Cortex-M4 | 16 kHz | 32 | 88 | 65k | 5k | 50k |
| 64 | 94 | 57k | ||||
| 128 | 107 | 65k | ||||
| 256 | 132 | 96k | ||||
| 512 | 233 | 147k | ||||
| Cortex-M4 | 32 kHz | 32 | 131 | 65k | 5k | 55k |
| 64 | 139 | 62k | ||||
| 128 | 142 | 70k | ||||
| 256 | 180 | 101k | ||||
| 512 | 250 | 152k |
HD AEC ARM Cortex-M55
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS per Mic | Per Channel Memory |
| Cortex-M55 | 8 kHz | 32 | 32.5 | 47k |
| 64 | 35 | 50k | ||
| 128 | 37.5 | 57k | ||
| 256 | 42.5 | 65k | ||
| Cortex-M55 | 16 kHz | 32 | 66.25 | 50k |
| 64 | 70 | 57k | ||
| 128 | 80 | 65k | ||
| 256 | 98.75 | 96k | ||
| Cortex-M55 | 32 kHz | 32 | 132.5 | 50k |
| 64 | 140 | 57k | ||
| 128 | 160 | 65k | ||
| 256 | 197.5 | 96k | ||
| Cortex-M55 | 48 kHz | 32 | 146.25 | 50k |
| 64 | 152.75 | 50k | ||
| 128 | 176.25 | 57k | ||
| 256 | 217.5 | 57k |
HD AEC ARM Cortex-M7
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS*per Mic | Per Channel Memory |
| Cortex-M7 | 8 kHz | 32 | 26 | 47k |
| 64 | 28 | 50k | ||
| 128 | 30 | 57k | ||
| 256 | 34 | 65k | ||
| Cortex-M7 | 16 kHz | 32 | 53 | 50k |
| 64 | 56 | 57k | ||
| 128 | 64 | 65k | ||
| 256 | 79 | 96k | ||
| Cortex-M7 | 32 kHz | 32 | 106 | 50k |
| 64 | 112 | 57k | ||
| 128 | 128 | 65k | ||
| 256 | 158 | 96k | ||
| Cortex-M7 | 48 kHz | 32 | 117 | 50k |
| 64 | 123 | 50k | ||
| 128 | 141 | 57k | ||
| 256 | 174 | 57k |
HD AEC ARM Cortex-M33/M35 – Estimate
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS*per Mic | Per Channel Memory |
| Cortex-M33 | 8 kHz | 32 | 36.4 | 47k |
| 64 | 39.2 | 50k | ||
| 128 | 42 | 57k | ||
| 256 | 47.6 | 65k | ||
| Cortex-M33 | 16 kHz | 32 | 74.2 | 50k |
| 64 | 78.4 | 57k | ||
| 128 | 90 | 65k | ||
| 256 | 111 | 96k | ||
| Cortex-M33 | 32 kHz | 32 | 170 | 50k |
| 64 | 157 | 57k | ||
| 128 | 179.1 | 65k | ||
| 256 | 221 | 96k | ||
| Cortex-M33 | 48 kHz | 32 | 163.8 | 50k |
| 64 | 172.2 | 50k | ||
| 128 | 197.4 | 57k | ||
| 256 | 244 | 57k |
SAEC ARM Cortex-M7
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS*per Mic | Per Channel Memory |
| Cortex-M7 | 48 kHz | 32 | 257 | 65k |
| 64 | 271 | 65k | ||
| 128 | 310 | 96k | ||
| 256 | 383 | 96k |
SAEC ARM Cortex-M33/M35 – Estimate
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS*per Mic | Per Channel Memory |
| Cortex-M33/35 | 48 kHz | 32 | 360 | 65k |
| 64 | 380 | 65k | ||
| 128 | 434 | 96k | ||
| 256 | 536 | 96k |
HD AEC C674x | HD AEC C7x
CPU Utilization & Memory Requirements
All Memory usage is given in units of byte.
Platform Sampling Rate Tail Length (msec) MIPS* per Mic Per Channel Memory C674x 8 kHz 32 19 25k 64 20 34k 128 21 55k 256 22 110k 320 24 143k 400 62 160k C674x 16 kHz 32 33 45k 64 34 61k 128 36 96k 256 38 180k 320 43 223k 400 48 250k C674x 32 kHz 32 65 56k 64 67 86k 128 71 157k 256 77 350k 320 81 470k 400 85 470k C674x 48 kHz 32 78 68k 64 103 114k 128 111 234k 256 125 584k 320 133 814k 400 141 1100k
* with Anti-howling
Note: MIPS generated with single mic enabled, and running with on chip (internal) program and data memory only.
When using external source for program and data memory, MIPS increase by 3x per enabled microphone.
HD AEC C64x / C64x+
CPU Utilization & Memory Requirements
All Memory usage is given in units of byte.
Platform Sampling Rate Tail Length (msec) MIPS* per Mic Per Channel Memory C64x / C64x+ 8 kHz 32 22 30k 64 27 45k 128 35 81k 256 51 179k 320 57 240k 400 63 300k C64x / C64x+ 16 kHz 32 43 54k 64 51 80k 128 67 140k 256 101 282k 320 119 365k 400 150 450k C64x / C64x+ 32 kHz 32 85 75k 64 103 128k 128 136 259k 256 204 620k 320 238 847k 400 300 1000k C64x / C64x+ 48 kHz 32 110 99k 64 132 185k 128 188 410k 256 290 1085k 320 — — 400 342 1534k
* with Anti-howling
Note: MIPS generated with single mic enabled, and running with on chip (internal) program and data memory only.
When using external source for program and data memory, MIPS increase by 3x per enabled microphone.
HD AEC C55x
CPU Utilization & Memory RequirementsAll Memory usage is given in units of byte.
| Platform | Sampling Rate | Tail Length (msec) | MIPS* per Mic | Per Channel Memory |
| C55x | 8 kHz | 16 | 34 | 52k |
| 32 | 35 | 53k | ||
| 48 | 37 | 55k | ||
| 64 | 38 | 56k | ||
| 96 | 41 | 58.6k | ||
| 128 | 42 | 61k | ||
| C55x | 16 kHz | 16 | 68 | 52.5k |
| 32 | 71 | 55.6k | ||
| 48 | 78 | 58.6k | ||
| 64 | 81 | 61k | ||
| 96 | 92 | 68k | ||
| 128 | 100 | 74k |
Note: MIPS generated with AGC, NR and CNG enabled. *NR2 is not turned on.
HD AEC ARM Windows/Linux 32 Bit*
CPU Utilization & Memory Requirements
All Memory usage is given in units of byte.
*Contact Sales for 64 Bit numbers.Platform Sampling Rate Tail Length (msec) MIPS* per Mic Per Channel Memory Windows/Linux 8 kHz 32 81 28k 64 92 37k 128 127 58k 256 186 113k 320 220 147k 400 262 195k Windows/x86 16 kHz 32 160 52k 64 194 68k 128 248 104k 256 373 187k 320 429 235k 400 506 301k Windows/x86 32 kHz 32 821 56k 64 1089 86k 128 1409 157k 256 2284 350k 320 2489 470k 400 2702 600k Windows/x86 48 kHz 32 1266 68k 64 103 114k 128 1913 234k 256 2966 584k 320 3493 814k 400 1400 1004k
* with Anti-howling
Note: MIPS generated with single mic enabled, and running with on chip (internal) program and data memory only.
When using external source for program and data memory, MIPS increase by 3x per enabled microphone.
HD AEC SHARC+ DSP
CPU UtilizationSHARC+ ADSP-21569
| Platform | Sampling Rate | Tail Length (msec) | Avg MIPS | Max MIPS |
| ADSP-21569 | 48 kHz | 200 | 102 | – |
Demos
HD AEC: Get the demos
Demo request form will put you in contact with our sales team. They will supply you with a complete list of hardware requirements. Demo/Eval agreement will be required to download the software. Thank you for your interest!
HD AEC NXP MIMXRT685-EVK Arm® Cortex®-M33
Hardware Requirements: i.MX RT600 EVK (MIMXRT685-EVK)
HD AEC STM32F76xx Arm® 32-bit Cortex®-M7
HD AEC Full Duplex STM32F4 Demo Arm® 32-bit Cortex®-M4
Hardware Requirements: STM32F407G-DISC1, combined with the STM32F4BIS-BB extension board
HD AEC Linux VoIP Engine BeagleBone Green Demo
Hardware Requirements: BeagleBone Green (BBG), or BeagleBone Green Wireless (BBGW)
Click above to view HD AEC CPU Usage and Memory Requirements: Texas Instruments’ TMS320C6000, TMS320C5000 | Arm Architectures (v5, v6, v7-A/R, Armv7E-M, Armv8-A, Armv8-R) | Linux 32-bit/64-bit | Windows x86 / x64.
Adaptive Digital Technologies’ high definition acoustic echo canceller (HD AEC), has integrated Noise Reduction and AGC into its AEC algorithm and created appropriate hooks to make them work together seamlessly.
NOISE REDUCTION
Noise Reduction is done pre-NLP, resulting in a far cleaner audio stream feeding into the non-linear processor. By making the AGC aware of the AEC state, we can avoid having the AGC becoming a cause of howling. Changes in gain can adversely affect an AEC; Adaptive Digital’s HD AEC has the ability to adapt to changes in the acoustic path (including gain/loss changes.) And when the changes are known, like in the case of controlled gain changes, Adaptive Digital’s HD AEC has hooks that enable the application to tell it the nature of the gain change so it can adjust immediately rather than take time to reconverge.
AUTO GAIN CONTROL
Automatic Gain Control (AGC) is provided to help boost lower level speech signals in hands-free environments. The AGC algorithm is used to automatically adjust the speech level of an audio signal so that the level falls within a user-defined output level range.
ANTI-HOWLING
Howling can occur when there is a full-duplex communication link with echo at both ends. These echo, or coupling, paths create feedback loops. In full-duplex communication systems where, by definition, both communication paths are open at all time, howling can be a serious issue. With Anti-howling enabled the HD AEC identifies when instability is starting to occur and takes action to mitigate the instance of feedback looping. HD AEC electronically removes both direct coupling and reflected echo, enabling true full-duplex hands-free telephony.
FAST CONVERGENCE and RECONVERGENCE
Convergence time is the time it takes the echo cancel algorithm to analyze the signal. This number can never be “0” as analyzing the signal is a critical part of the echo cancellation process. Adaptive Digital’s HD AEC analyses the signal in as finite a period as is possible to best develop the echo model, and then cancels the echo immediately.
DOUBLE-TALK
Superior Double-talk performance. Double talk occurs when the speech of two talkers overlap causing the audio signals to arrive simultaneously at the echo canceller. Detection of double-talk is vital to the performance of an acoustic echo canceller.
HD AEC VARIANTS
Single microphone (standard) and Multi-microphone , and Stereo.
USER CONTROLLED PARAMETERS (SUMMARY)
- Sampling Rate
- Tail Length
- Frame Size
- NLP Control
- AGC Control
- Equalizer Control
- Noise Reduction Control
Howling Control
Functional Description
The figure below is a simplified block diagram of the HD Acoustic Echo Canceller.
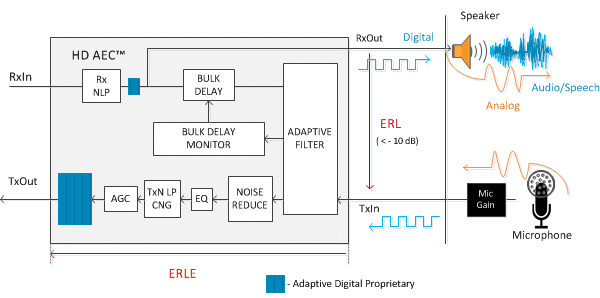
The top half of the diagram shows the receive signal path, or the signal path from the telephone network to the speaker. The bottom half of the diagram shows the transmit signal path from the microphone toward the telephone network. The HD AEC cancels the echo that occurs between the speaker output and the microphone input.
The terms Rx (Receive) and Tx (Transmit) may be confusing at first because both the receive and transmit paths have inputs and outputs. The names receive and transmit are used from the point-of-view of the person at the speaker/microphone side.
The RxIn signal coming from the network is fed into the RxNLP (Receive Nonlinear Processor). Under difficult acoustic conditions, the RxNLP can improve full-duplex operation and hence the overall voice quality.
The output of the RxNLP is fed both to the transmit output (TxOut) and into the bulk delay block. The bulk delay block compensates for the buffering delay at the RxOut and TxIn interfaces as well as any other non-acoustic system delays in the path between RxOut and TxIn. The output of the bulk delay is fed to the adaptive filter.
The adaptive filter estimates the echo and subtracts it from the TxIn signal to form the residual signal.
The residual signal is fed to the noise reduction block. This noise reduction block removes background noise and therefore improves the signal to noise ratio of the transmit signal.
The adaptive filter works in conjunction with the bulk delay monitor, which monitors and adjusts bulk delay in situations where the bulk delay is unknown due non-deterministic audio drivers.
The output of the noise reduction block is fed into an equalizer. The equalizer is used to flatten out the frequency response of the transmit channel. This may be necessary due to the acoustics of the hands-free device and due to the characteristics of the microphone itself.
The output of the transmit equalizer is fed into the transmit non-linear processor (TxNLP). The TxNLP increases the echo attenuation by attenuating the residual by a variable amount based upon the talk state. The TxNLP block also includes a comfort noise generator.
Automatic Gain Control (AGC) is provided to help boost lower level speech signals in hands-free environments. The compute gain block computes the AGC gain. The output of the TxNLP is fed into the AGC gain block, which provides gain or loss depending upon the residual signal level. The output of the AGC is fed to the TxOut output of the AEC.
In the multi-microphone case, there is still a single receive path but there is one transmit path per microphone.
In the case of multi-microphone noise reduction, there is a single receive path, a complete transmit path for the primary microphone, and a partial transmit path for the secondary microphone. In this case, there are two transmit inputs (one for each microphone) but only one transmit output containing the echo cancelled and noise reduced signal.

Significant Upgrades
"We have made significant changes to our core algorithm in order to boost efficiency. HD AEC operate in a higher audio bandwidth. We have improved implementation by simplifying and providing straight forward API."

Full-Duplex Operation
Even in challenging conditions such as unbalanced speech levels, close speaker to mic proximity, background noise, double talk, and echo path changes, AEC HD achieves good full-duplex performance.
Enhancements
Bi-directional NLP: Handles unbalanced speech levels of more than 18dB apart.
Achieves full-duplex performance even in close mic to speaker proximity: Automatic gain and level controls adjust levels automatically.
High Echo Return Loss (ERL) ratio: Ability to handle long tail lengths, speaker to microphone loss/gain, and feedback.
Enhanced double-talk detection /double-talk handling.
Fast reconvergence: Ability to adjust for echo path changes which can occur when someone moves inside the room, passes an object across the table, or enters or exits the room.
Function APIs
API function call summary
HDAEC_
AEC_ADT_create(..) Create and initializes an echo canceller
AEC_ADT_createMMIC(…) – channel (single mic, multi-mic, dual-mic with noise reduction)
AEC_ADT_createDMNR(…)
AEC_ADT_apply(…) Executes cancellation function
AEC_ADT_applyMMIC(…)
AEC_ADT_applyTx(…) Executes Transmit Only (for applications that require split tx/rx processing
AEC_ADT_applyRx(…) Executes Receive Only (for applications that require split tx/rx processing
AEC_ADT_control(…) Modify AEC parameters. Obtain status.
AEC_ADT_controlMMIC(…)
AEC_ADT_delete(…) Deletes an echo canceller channel
AEC_ADT_deleteMMIC(…)